自动控制网移动版
导航切换
首页
行业资讯
基础知识
电气控制
自动化
机器人
传感器
工业通讯
执行机构
线性系统
机床
过程控制
机电一体化
智能控制
计算机仿真控制系统
机电造型设计
机械工程控制
机械制造
液压传动
机械设计制造
自动控制原理
信号与系统
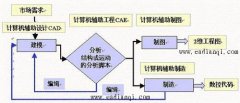
CAD/CAM软件分类
CAD/CAM技术特点
状态空间表达式的模拟结构图
状态变量及状态空间表达式
系统校正的一般概念
系统的相对稳定性
奈奎斯特稳定判据(Nyquist Stability Criterion)
劳斯-胡尔维茨稳定性判据
控制系统的稳定性
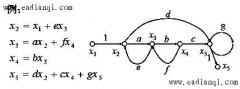
信号流图及梅逊公式
方框图及动态系统的构成
传递函数
首页
上一页
130
131
132
133
134
135
136
137
138
139
下一页
末页
共
139
页
1658
条
最近关注
什么是过程控制?
液位控制回路PID参数设置要强比例弱积分
看图识PID调节器的过调
双增益PID的控制原理
PID控制系统的稳定性
控制阀Cv、Kv和C的换算及详尽推导过程
什么是调节器临界比例度整定法闭环振荡法
比例微分控制和PD调节器