|
控制回路性能不佳的常见问题包括振荡、响应缓慢和噪声等。振荡指测量值与设定值的周期性偏差。响应缓慢是回路从干扰中恢复或跟踪设定值变化缓慢。噪声指过程变量中的随机行动。
振荡可能来自控制回路内部,也可能是由外部因素引起的。振荡也可能是两个或多个控制回路之间周期性相互作用的结果。为了寻找可能引起振荡的原因,应将PID调节器置于手动模式,以查看振荡是否停止。如果在PID调节器处于手动模式时振荡仍然存在,则振荡源自回路外部。然后应对相互作用的回路和设备进行振荡分析,以找到根本原因。如果在PID调节器处于手动模式时不振荡,则振荡源来自控制回路参数、检测仪表或最终控制元件。 控制回路PID参数不合理引起的振荡,可以根据曲线的相位偏移找到可能的原因。常见的两种可能: 1、如果OP(PID控制输出)和PV(测量值)同时达到峰值,则振荡主要由于比例太强或者存在周期性干扰引起的,如下图所示。 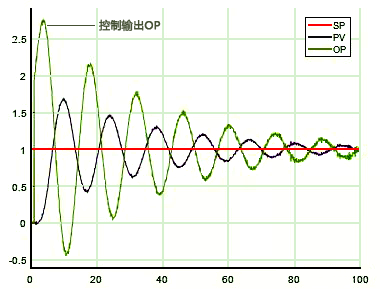 图1 比例作用太强引起的振荡 2、如果在PV(测量值)越过设定值SP时OP(PID控制输出)达到峰值,则振荡主要由于积分作用太强引起,如下图所示。 本文来自www.eadianqi.com 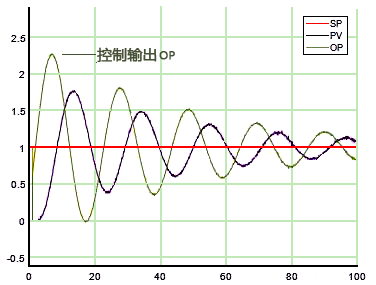 图2 积分作用太强引起的振荡 实际过程中如果振荡但是积分作用太强的特征不明显,可以先减弱比例作用试试。 |