|
整定自控系统除PID参数整定外,自动控制网小编还提醒大家注意整定自控系统参数的七个问题,同时大家也应避免进入自控系统参数整定的七个误区,才能又快又好地将自控系统参数整定达到最佳控制效果。 1、对微分的认识误区 认为微分就是超前调节,如果被调量或者测量值有滞后,就要加微分。微分是有超前调节的功能,但是微分作用有些地方不能用:测量值存在不间断的微小波动的时候。尤其是水位、气压测量,波动始终存在时,本来一直在考虑滤波呢,如果再加个微分就会造成调节干扰。不如不要微分。 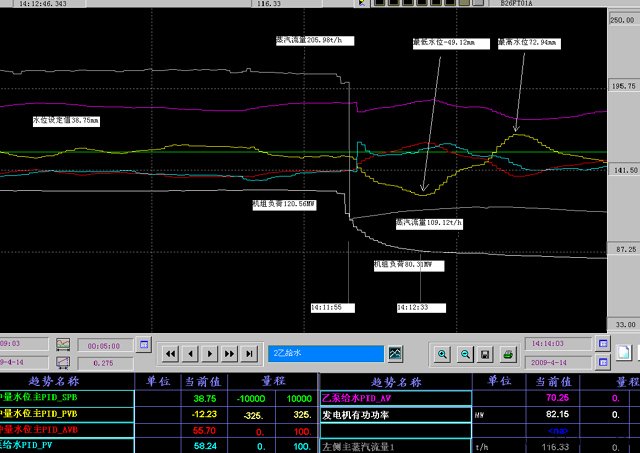 图1 主蒸汽流量大干扰下的汽包水位波动曲线 本文来自www.eadianqi.com 2、对积分的认识误区 有些人发现偏差就要调积分,偏差存在有可能是系统调节缓慢比例作用也有可能影响,如果积分作用盖过了比例作用,那么这个系统就很难稳定。 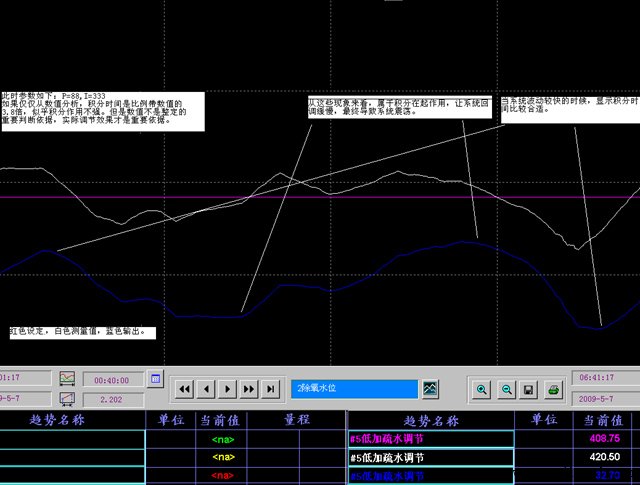 图2 积分作用过强造成的系统不稳 上面说过:初学者容易强调积分作用,熟练者容易忽略积分作用。不再赘述。 3、对耦合系统中,超前调节的认识误区 对于耦合系统,大家都容易考虑一个捷径:增加前馈调节。这个毛病甚至搞自动控制的老手都容易犯,毕竟捷径谁都想走。比如众所周知的协调控制,经典控制法中,就有负荷和汽压互为前馈的控制策略设计。这个方法也不为错,但是更普适更好的方法是一种整定参数的思想,参数设置合理的话这个前馈画蛇添足。 要积极探讨各种控制办法。 |