|
вЕНчгаИіећЖЈПкОїЃКВЮЪ§ећЖЈевзюМбЃЌ ДгаЁЕНДѓЫГађВщЁЃЯШЪЧБШР§КѓЛ§ЗжЃЌ зюКѓдйАбЮЂЗжМгЁЃЧњЯпеёЕДКмЦЕЗБЃЌ БШР§ЖШХЬвЊЗХДѓЁЃЧњЯпЦЏИЁШЦДѓЭфЃЌ БШР§ЖШХЬЭљаЁАтЁЃЧњЯпЦЋРыЛиИДТ§ЃЌ Л§ЗжЪБМфЭљЯТНЕЁЃЧњЯпВЈЖЏжмЦкГЄЃЌ Л§ЗжЪБМфдйМгГЄЁЃЧњЯпеёЕДЦЕТЪПьЃЌ ЯШАбЮЂЗжНЕЯТРДЁЃЖЏВюДѓРДВЈЖЏТ§ЃЌ ЮЂЗжЪБМфгІМгГЄЁЃРэЯыЧњЯпСНИіВЈЃЌ ЧАИпКѓЕЭЫФБШвЛЁЃвЛПДЖўЕїЖрЗжЮіЃЌ ЕїНкжЪСПВЛЛсЕЭЁЃ здЖЏПижЦЭјwww.eadianqi.comАцШЈЫљга вЛАудкЙЄГЬгІгУжаВЩгУОбщДеЪдЗЈЁЃ БОЮФРДздwww.eadianqi.com ОбщДеЪдЗЈдкЪЕМљжазюЮЊЪЕгУЁЃдкећЖЈВЮЪ§ЪБЃЌБиаыШЯецЙлВьЯЕЭГЯьгІЧщПіЃЌИљОнЯЕЭГЕФЯьгІЧщПіОіЖЈЕїећФЧаЉВЮЪ§ЁЃ здЖЏПижЦЭјwww.eadianqi.comАцШЈЫљга ећЖЈВНжшЃКЯШБШР§ЃЌКѓЛ§ЗжЃЌдйЮЂЗжЁЃ БОЮФРДздwww.eadianqi.com
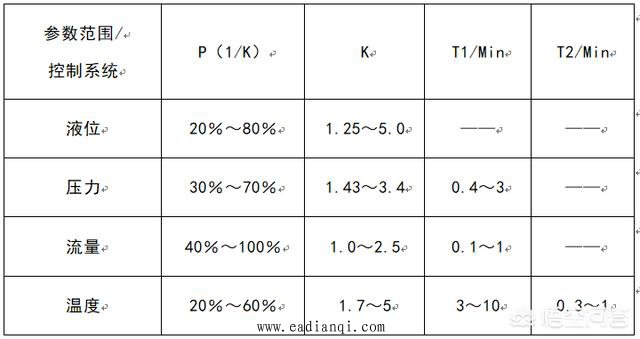
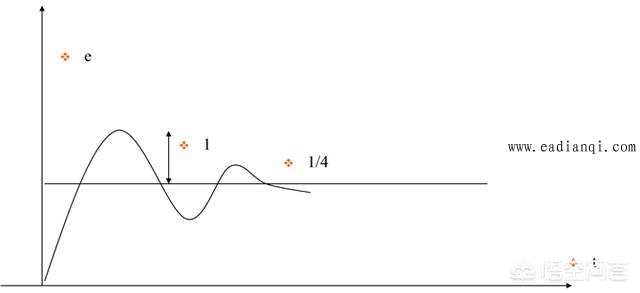
ећЖЈБШР§ВЮЪ§ЃКЪзЯШНЋPжЕЗХдкНЯаЁЕФЮЛжУЃЌШЛКѓж№НЅдіДѓЃЌЙлВьБЛПиСПБфЛЏЧњЯпЃЌЪЙБЛПиЖдЯѓЃЈЮТЖШЃЉгыЧ§ЖЏЦїЃЈБэРфЗЇЃЉгаЖдгІЕФБфЛЏЁЃ БОЮФРДздwww.eadianqi.com ећЖЈЛ§ЗжВЮЪ§ЃКдкећЖЈБШР§ВЮЪ§КѓЃЌНЋБШР§жЕЫѕаЁЃЈ10ЁЋ20ЃЅЃЉЃЌШЛКѓНЋЛ§ЗжЪБМфT1гЩДѓЕНаЁж№ВНМгШыЃЌжБЕНЛёЕУ4ЃК1ЫЅМѕЙ§ГЬЁЃ БОЮФРДздwww.eadianqi.com PIDПижЦВЮЪ§ећЖЈЗНЗЈЃК здЖЏПижЦЭјwww.eadianqi.comАцШЈЫљга
ећЖЈЮЂЗжВЮЪ§ЃКдкећЖЈБШР§ЁЂЛ§ЗжВЮЪ§КѓЃЌНЋБШР§жЕдіДѓЃЈ10ЁЋ20ЃЅЃЉЃЌШЛКѓНЋЮЂЗжЪБМфTгЩаЁЕНДѓж№ВНМгШыЃЌЙлВьЙ§ЖЩЧњЯпЃЌжБЕНЛёЕУТњвтЕФЙ§ЖЩЙ§ГЬЁЃ здЖЏПижЦЭјwww.eadianqi.comАцШЈЫљга ГЃМћБЛПиЖдЯѓЕФPIDВЮЪ§бЁдёЗЖЮЇЃЈОбщжЕЃЉ БОЮФРДздwww.eadianqi.com
ећЖЈддђЃКВЛФмШУЯЕЭГГіЯжЗЂЩЂеёЕД; БОЮФРДздwww.eadianqi.com ШчГіЯжЗЂЩЂеёЕДЃЌгІСЂМДЧаЮЊЪжЖЏЃЌЕШЯЕЭГЮШЖЈКѓМѕаЁЗХДѓБЖЪ§ЁЂдіДѓЛ§ЗжЪБМфЛђМѕаЁЮЂЗжЪБМфЕШНЕЕЭPIDаЇгУЕФЪжЖЮЃЌШЛКѓВХФмжиаТЧаЛЛЕНздЖЏПижЦЁЃ БОЮФРДздwww.eadianqi.com |
 БОЮФРДздwww.eadianqi.com
БОЮФРДздwww.eadianqi.com