|
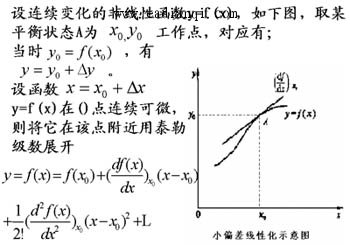
用拉氏求解线性定常微分方程的过程可归结如下:
6、运动的模态
在数学上,线性微分方程的解由特解和齐次微分方程的通解组成。通解由微分方程的特征根所决定,它代表自由运动。 本文来自www.eadianqi.com
|
|
用拉氏求解线性定常微分方程的过程可归结如下:
6、运动的模态
在数学上,线性微分方程的解由特解和齐次微分方程的通解组成。通解由微分方程的特征根所决定,它代表自由运动。 本文来自www.eadianqi.com
|
一、系统过渡过程的性能指标 质量指标: 在比较不同控制方案时,应首先规定评价控制系...
复指数信号(序列): 或 第二种表达方式与连续相对应,但是离散指数信号用得更多的是...
直流测速机是一种测速元件,实际上它就是一台微型的直流发电机。根据定子磁极激磁方式...
1、偏心轴套调整法 图1所示为最简单的偏心轴套式消隙结构。电动机2通过偏心轴套1装在...
机械系统的制动问题就是讨论在一定时间内把机械装置减速至预定的速度或减速到停止时的...
1.开环控制系统 指系统的输出端与输入端不存在反馈回路,输出量对系统的控制作用不发...
定义1 智能机器 能够在定形或不定形,熟悉或不熟悉的环境中自主地或与操作人员交互作用...
自动控制系统已被广泛应用于人类社会的各个领域。 在工业方面,对于冶金、化工、机械...
控制:通过对一定对象实施一定的操作,以使其按照预定的规律运动或变化的过程。 被控...
自动控制的功能是 : 在没有人的直接参与下,通过控制装置使受控对象的被控量按照预定的...
该机床的液压系统能够完成的主要任务是:工作台的往复运动和抖动,砂轮架的横向快速进...
过程控制系统的分类方法委很多,若按被控参数的名称来分,有温度、压力、流量、液位、...
 本文来自www.eadianqi.com
本文来自www.eadianqi.com 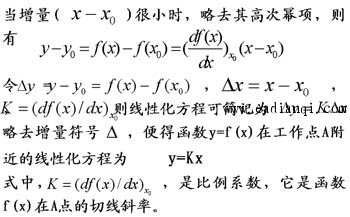

 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有