|
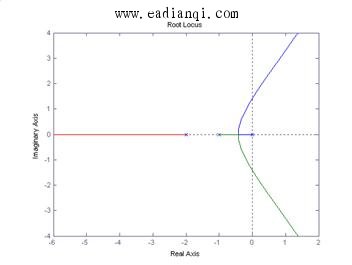
Аэ1 ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР ТСЦӘДіПөНіөДҝӘ»·ҙ«өЭәҜКэОӘG(s)H(s)=K/s(s+1)(s+2)КФ»жЦЖПөНіёщ№мјЈЈ¬ІўИ·¶ЁПөНіБЩҪзОИ¶ЁКұ¶ФУҰөДҝӘ»·ФцТжј°¶ФУҰПөНіБЩҪзЧиДбұИөДҝӘ»·ФцТжЎЈ ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР
Matlab·ВХжіМРтИзПВЈә ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР
clear ұҫОДАҙЧФwww.eadianqi.com clc ұҫОДАҙЧФwww.eadianqi.com
num=1; ұҫОДАҙЧФwww.eadianqi.com den=poly([0-1-2]);%УЙПөНіөДј«өгЗуПөНіҝӘ»·ҙ«әҜөД·ЦДё¶аПоКҪ ұҫОДАҙЧФwww.eadianqi.com rlocus(num,den);%»ӯёщ№мјЈ ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР [k,p]=rlocfind(num,den)%И·¶Ёёщ№мјЈДіТ»өгҙҰөДҝӘ»·ФцТжЦө ұҫОДАҙЧФwww.eadianqi.com ·ВХжҪб№ыЈә ұҫОДАҙЧФwww.eadianqi.com
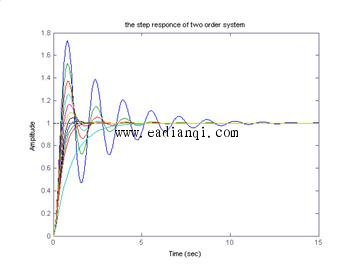
ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР Аэ2 ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР ТСЦӘөдРН¶юҪЧПөНіөДҙ«өЭәҜКэОӘG(s)=wn^2/(s^2+2*i*wn+wn^2),КФ»жЦЖөұwn=4КұЈ¬·ЦұрОӘ0.1Ј¬0.2Ј¬Ј®Ј®Ј®Ј¬1Ј®0Ј¬2Ј®0КұөДПөНіөДөҘО»ҪЧФҫПмУҰЎЈ ұҫОДАҙЧФwww.eadianqi.com Matlab·ВХжіМРтИзПВЈә ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР
close ұҫОДАҙЧФwww.eadianqi.com
clear ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР clc ұҫОДАҙЧФwww.eadianqi.com wn=4; ұҫОДАҙЧФwww.eadianqi.com kosai=[0.1:0.1:1,2]; ұҫОДАҙЧФwww.eadianqi.com figure(1) ұҫОДАҙЧФwww.eadianqi.com holdon ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР
fori=kosai ұҫОДАҙЧФwww.eadianqi.com num=wn*wn; ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР den=[12*i*wnwn*wn]; ұҫОДАҙЧФwww.eadianqi.com
step(num,den) ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР end ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР title('thestepresponceoftwoordersystem'); ұҫОДАҙЧФwww.eadianqi.com
·ВХжҪб№ыЈә ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР
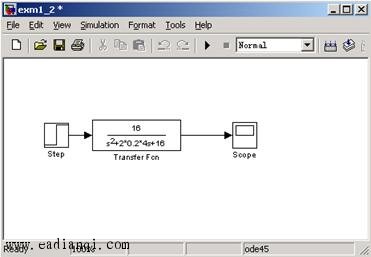
Аэ3 ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР Simulink·ВХжИзПВЈә ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР
ұҫОДАҙЧФwww.eadianqi.com
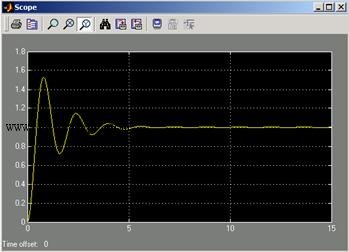
ЧФ¶ҜҝШЦЖНшwww.eadianqi.com°жИЁЛщУР ·ВХжҪб№ыЈә ұҫОДАҙЧФwww.eadianqi.com
|
 ұҫОДАҙЧФwww.eadianqi.com
ұҫОДАҙЧФwww.eadianqi.com