|
根据校正装置的特性,校正装置可分为超前校正装置、滞后校正装置和滞后-超前校正装置。 (1) 超前校正装置 校正装置输出信号在相位上超前于输入信号,即校正装置具有正的相角特性,这种校正装置称为超前校正装置,对系统的校正称为超前校正。 (2) 滞后校正装置 校正装置输出信号在相位上落后于输入信号,即校正装置具有负的相角特性,这种校正装置称为滞后校正装置,对系统的校正称为滞后校正。 (3) 滞后-超前校正装置 若校正装置在某一频率范围内具有负的相角特性,而在另一频率范围内却具有正的相角特性,这种校正装置称滞后-超前校正装置,对系统的校正称为滞后-超前校正。 1 比例(P)控制规律 比例控制器的传递函数为 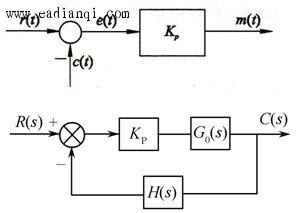 具有比例控制器的系统 2 比例-微分(PD)控制规律 比例-微分控制器的传递函数为 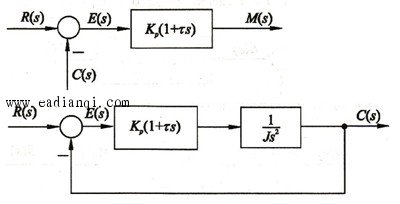 具有比例-微分控制器的系统 3 积分(I)控制规律 积分控制的传递函数 4 比例-积分(PI)控制规律 PI控制器的传递函数为 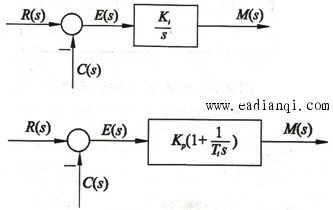 5 比例-积分-微分(PID)控制规律 PID控制器传递函数为 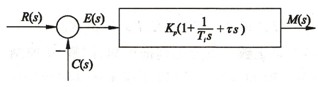 本文来自www.eadianqi.com 本文来自www.eadianqi.com 常用校正装置及其特性——无源校正网络 1 无源超前网络 RC网络构成的超前校正装置,传递函数为 a-分度系数 T-时间常数 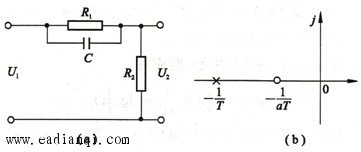 校正装置的零点  校正网络的频率特性曲线如图所示,相频曲线具有正相角,即网络的稳态输出在相位上超前于输入,故称为超前校正网络。超前网络产生的超前相角为 本文来自www.eadianqi.com 其最大超前角频率 其最大超前相角 其对数幅频值 2 无源滞后网络 RC网络构成的滞后校正装置,传递函数为 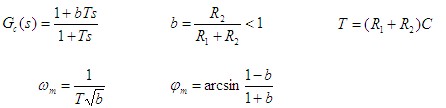 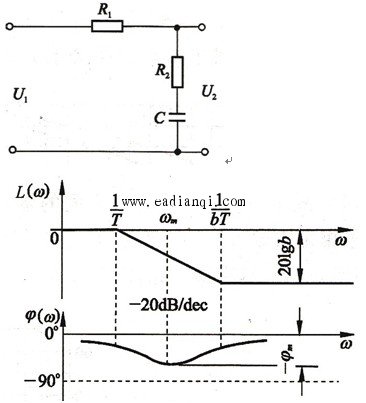 3 无源滞后+超前网络 RC网络构成的滞后-滞后校正装置,传递函数为   常用校正装置及其特性——有源校正网络 自动控制网www.eadianqi.com版权所有 1 有源超前校正装置 比例-微分(PD)  2 有源滞后校正装置 比例-积分(PI)  3 有源滞后-超前校正装置 比例-积分-微分(PID) 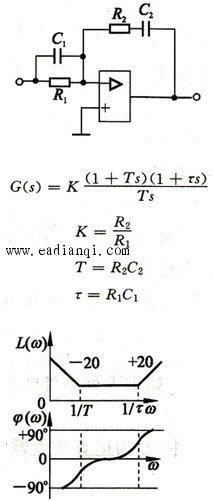
|