自动控制网移动版
导航切换
首页
行业资讯
基础知识
电气控制
自动化
机器人
传感器
工业通讯
执行机构
线性系统
机床
过程控制
机电一体化
智能控制
计算机仿真控制系统
机电造型设计
机械工程控制
机械制造
液压传动
机械设计制造
自动控制原理
信号与系统
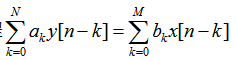
由线性常系数差分方程表征的LTI系统
系统因果稳定性分析
离散时间系统响应的Z域分析
简单常用离散信号的z变换对图表
Z变换的基本性质
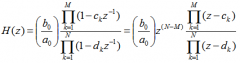
离散时间信号与系统分析工具――Z分析系统函数的零、极点
三种反变换方法
反变换定义
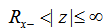
Z变换收敛域的定义
Z变换和拉普拉斯变换FT之间的关系
Z变换和离散傅立叶变换FT之间的关系
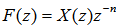
Z变换的定义式
首页
上一页
1
2
3
4
5
6
7
8
9
10
11
下一页
末页
共
139
页
1658
条
最近关注
什么是过程控制?
液位控制回路PID参数设置要强比例弱积分
看图识PID调节器的过调
双增益PID的控制原理
PID控制系统的稳定性
控制阀Cv、Kv和C的换算及详尽推导过程
什么是调节器临界比例度整定法闭环振荡法
比例微分控制和PD调节器