|
临界比例度法整定PID参数也是一种常用调节器参数整定方法,电气自动化控制网小编在本文对这种方法做详细介绍。 1、临界振荡过程 控制系统在外界干扰作用后,不能恢复到稳定的平衡状态,而出现一种既不衰减,也不发散的等幅振荡过程,这样的过渡过程就称为临界振荡过程,如图1所示。我们在临界比例度法整定中,首先需要得到的就是临界参数,即在临界状态下,被控量y来回振荡一次所用时间,称为临界周期Tk;被调参数处于临界状态时的比例度,称为临界比例度δk。 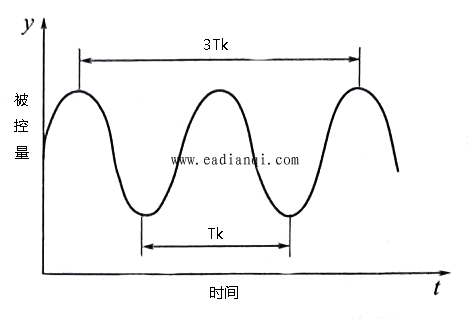 图1 临界振荡过程示意图 本文来自www.eadianqi.com 用临界比例度法整定PID参数时,要在纯比例作用下,在控制系统中由大到小的改变调节器的比例度,来诱发出过程控制回路中的等幅振荡,得到如图1所示的临界振荡过程,以得到我们所需要的临界比例度δk和临界周期Tk的数值。然后再根据经验公式,计算出调节器各参时间数的具体数值。 2、临界比例度法整定口诀 临界整定应用多,纯P运转减参数; 等幅振荡出现时,δk值Tk值为临界; 按照公式乘系数,P、I、D序不能错; 静观运行勤调整,细心寻求最佳值。 3、临界比例度法整定步骤 云南昌晖仪表制造有限公司结合口诀介绍临界比例度法的整定步骤。 ①先把积分时间放至最大微分时间放至零,比例度放至较大的适当值。“纯P转减参数”,就是使控制系统按纯比例作用的方式投入运行。然后慢慢地减少比例度,在外界干扰的作用下,细心观察调节器的输出信号和被调参数的变化情况;如果控制过程的曲线波动是衰减的,则把比例度继续调小,如果控制过程的曲线波动是发散的,则应把比例度调大些,直到曲线波动呈等幅振荡为止,以此得到临界振荡过程,从而得到临界比例度δk和临界周期Tk值。即口诀说的“等幅振荡出现时,δk值Tk值为临界”。 自动控制网www.eadianqi.com版权所有 ②“按照公式乘系数”即根据得到的δk和Tk值按表1临界比例度法参数计算公式表,来计算调节器的各参数值。 表1 临界比例度法参数计算公式表 调节规律 比例度δ/% 积分时间Ti/min 微分时间Td/min P 2δk PI 2.3δk 0.85Tk PID 1.78δk 0.5Tk 0.125Tk 自动控制网www.eadianqi.com版权所有 |