|
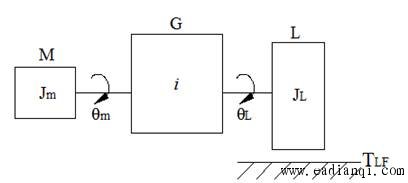
图1 电机、传动装置和负载的传动模型 自动控制网www.eadianqi.com版权所有 根据上面所述,机电一体化系统的传动装置在满足伺服电机与负载的力矩匹配的同时,应具有较高的响应速度,即启动和制动速度。因此,在伺服系统中,通常采用负载角加速度最大原则选择总传动比,以提高伺服系统的响应速度。传动模型如图1所示。图中: 自动控制网www.eadianqi.com版权所有
本文来自www.eadianqi.com
i——齿轮系G的总传动比。 本文来自www.eadianqi.com 根据传动关系有 自动控制网www.eadianqi.com版权所有
本文来自www.eadianqi.com
式中
本文来自www.eadianqi.com
本文来自www.eadianqi.com
则 自动控制网www.eadianqi.com版权所有
上式中改变总传动比i,则
若不计摩擦,即 本文来自www.eadianqi.com
则
上式表明,传动装置总传动比i的最佳值就是 本文来自www.eadianqi.com
当然,上述分析是忽略了传动装置的惯量影响而得到的结论,实际总传动比要依据传动装置的惯量估算适当选择大一点。在传动装置设计完以后,在动态设计时,通常将传动装置的转动惯量归算为负载折算到电机轴上,并与实际负载一同考虑进行电机响应速度验算。 本文来自www.eadianqi.com |
 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有  ——
—— ——电动机M的角位移; 本文来自www.eadianqi.com
——电动机M的角位移; 本文来自www.eadianqi.com  ——负载L的转动惯量;
——负载L的转动惯量;  ——负载L的角位移;
——负载L的角位移;  ——摩擦阻抗转矩; 本文来自www.eadianqi.com
——摩擦阻抗转矩; 本文来自www.eadianqi.com  (1)
(1)  、
、  、
、 一一电动机的角位移、角速度、角加速度; 本文来自www.eadianqi.com
一一电动机的角位移、角速度、角加速度; 本文来自www.eadianqi.com  、
、 、
、 ——负载的角位移、角速度、角加速度。
——负载的角位移、角速度、角加速度。  。 设
。 设 为电动机的驱动转矩,在忽略传动装置惯量的前提下,根据旋转运动方程,电动机轴上的合转矩
为电动机的驱动转矩,在忽略传动装置惯量的前提下,根据旋转运动方程,电动机轴上的合转矩 为
为 
 (2)
(2)  ,则解得:
,则解得: 
 (3) 本文来自www.eadianqi.com
(3) 本文来自www.eadianqi.com