(1)步距误差:步距误差直接影响执行部件的定位精度。步进电动机单相通电时。步距误差取决于定子和转子的分齿精度和各相定子的错位角度的精度。多相通电时,步距角不仅与加工装配精度有关,还和各相电流的大小、磁路性能等因素有关。国产步进电动机的步距误差一般为 ,功率步进电动机的步距误差—般为 ,功率步进电动机的步距误差—般为 。精度较高的步进电动机可达 。精度较高的步进电动机可达  ~ ~ 。 。
(2)最大静转矩:是指步进电动机在某相始终通电而处于静止不动状态时,所能承受的最大外加转矩,亦即所能输出的最大电磁转矩,它反映了步进电动机的制动能力和低速步进运行时的负载能力。 自动控制网www.eadianqi.com版权所有
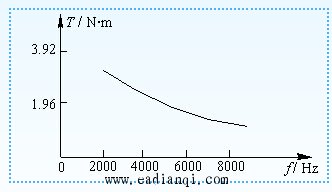
图1 运行矩频特性 本文来自www.eadianqi.com (3)启动矩一频特性:空载时步进电动机由静止突然启动,并不失步地进入稳速运行所允许的最高频率称为最高启动频率。启动频率与负载转矩有关。图6-15给出了90BF002型步进电动机的启动矩频特性曲线。由图可见,负载转矩越大,所允许的最大启动频率越小。选用步进电动机时应使实际应用的启动频率与负载转矩所对应的启动工作点位于该曲线之下,才能保证步进电动机不失步地正常启动。当伺服系统要求步进电动机的运行频率高于最大允许启动频率时,可先按较低的频率启动,然后按一定规律逐渐加速到运行频率。 本文来自www.eadianqi.com (4)运行矩频特性:步进电动机连续运行时所能接受的最高频率称为最高工作频率,它与步距角一起决定执行部件的最大运行速度。最高工作频率决定于负载惯量J,还与定子相数、通电方式、控制电路的功率驱动器等因素有关。图6-16是90BF002型步进电动机的运行矩频特性曲线。由图可见,步进电动机的输出转矩随运行频率的增加而减小,即高速时其负载能力变差,这一特性是步进电动机应用范围受到限制的主要原因之一。选用步进电动机时,应使实际应用的运行频率与负载转矩所对应的运行工作点位于运行矩频特性之下,才能保证步进电动机不失步地正常运行。 本文来自www.eadianqi.com
(5)最大相电压和最大相电流:分别是指步进电动机每相绕组所允许施加的最大电源电压和流过的最大电流。实际应用的相电压或相电流如果大于允许值,可能会导致步进电动机绕组被击穿或因过热而烧毁,如果比允许值小得太多,步进电动机的性能又不能充分发挥出来。因而设计或选择步进电动机的驱动电源时,应充分考虑这两个电气参数。 自动控制网www.eadianqi.com版权所有 |