|
有刷伺服电机 有刷伺服电机(brushed motor)的控制原理即是通过机械式电刷,改变电机线圈中的电流。由于有刷电机能改变流入的电流方向,因此可由直流电源(DC)供电。有刷伺服电机可分为2组零件: 自动控制网www.eadianqi.com版权所有 电机机壳即具有场磁铁(Field magnet),即定子(Stator) 自动控制网www.eadianqi.com版权所有 转子(Rotor)是由线圈所构成,中间具有铁制核心,并连接至电流变换器 本文来自www.eadianqi.com 电刷则接触电流变换器,将电流导入线圈中。在使用一段时间之后,电刷即可能磨耗并对系统产生摩擦力;但在无刷伺服电机中则不会发生此种情况。 自动控制网www.eadianqi.com版权所有 无刷伺服电机 本文来自www.eadianqi.com 大多数的无刷伺服电机均使用交流电源(AC)。无刷伺服电机的控制原理是将铁制核心置于外部。当转子成为暂时性的磁铁,定子则成为绕铁线圈。外部电路的电流将会在既定的转子位置进行反转。所以,此款伺服电机是由交流电所驱动的。当然亦有无刷DC伺服电机。这些电机一般均具备某些电子切换电路,可针对流入的DC进行变换。无刷伺服电机的价位较高,但较无磨损问题。 本文来自www.eadianqi.com 步进电机 自动控制网www.eadianqi.com版权所有
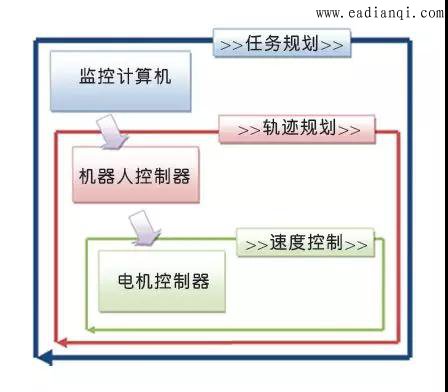
在机器人运动应用中,步进电机不如伺服电机普及,但仍为电机的重要范例,而且使用方式较为简易。与伺服电机相比,步进电机的速度较慢亦较为精确。步进电机中具有一系列内建的无刷齿(Brushless teeth),可在电流通过而改变电磁电荷后,由下一组刷齿拉动转子,前一组刷齿推动转子,从而为步进电机通电。 本文来自www.eadianqi.com 相较于伺服电机,由于步进电机可通过刷齿的数量(即等于所移动的距离)进而精确进行控制,因此一般情况下并不需要反馈。但可能因为障碍物而遗漏刷齿,因此可用编码器做为反馈。 自动控制网www.eadianqi.com版权所有 运动控制器与软件架构 本文来自www.eadianqi.com 许多制造商均建立了自家的驱动系统,以操控机器人。在考虑机器人应用中的运动控制系统时,可先了解初阶的网状循环,如下图所示。 本文来自www.eadianqi.com
自动控制网www.eadianqi.com版权所有 图5:运动控制软件架构 自动控制网www.eadianqi.com版权所有 至于机器人任务规划的较高阶功能,则是让机器人的行动达到最终的目标。它可能是以单一指令囊括多组目标,或可让机器人进入特定位置。若机器人采用遥控(Tele-operated)架构,那么这些指令最可能通过连接板外(off-board)的计算机而传送的,而且可在此人为操作选择机器人的后续动作或行为。在完全自动化的机器人中,根据决策用算法的不同,任务规划亦可能直接在板上执行。 自动控制网www.eadianqi.com版权所有 在规划路径时,往往会产生“我应该如何到目的地以完成此任务?”或是“我应如何让机器手臂移动到该位置?”等问题。而此种问题均可由机器人运动控制器完成。 本文来自www.eadianqi.com 一旦清楚目的地与行进速度之后,伺服电机控制器将发出控制信号(PWM或电流等)至实际的电机驱动,使其得以到达目的地。一般均以PID建构控制功能。另请注意,此时亦应建置安全性功能。举例来说,若高速行进中的机器人在目前的路径上侦测到人类,则应发出紧急信号以停止电机或立刻煞车。 自动控制网www.eadianqi.com版权所有 |