|
����6������ϵͳ��  ����7�������˻���ϵͳ���ã� �Զ�������www.eadianqi.com��Ȩ����  ����8���������ӣ� ��������www.eadianqi.com 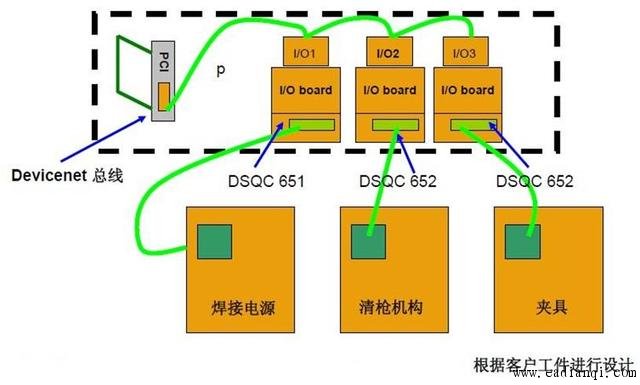 ����ͨ��ѡ��D651�� ��8 DO, 8 DI, 2 AO��0~10V���� ��������www.eadianqi.com
���������� Fronius��ESAB�� Kemppi ��Miller �Ⱥ��ӵ�Դ��ABB������Ӧ�ı� �ӿ����������û����Ӧ�Ľӿ�ģ�飬��ѡ��ͨ��ģ��������á� ��������www.eadianqi.com 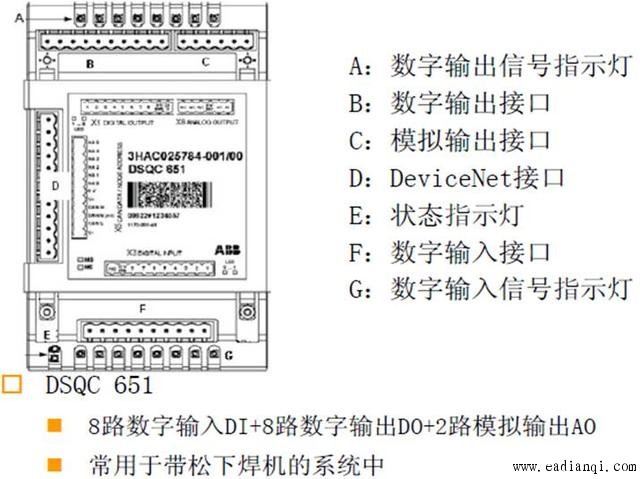 |