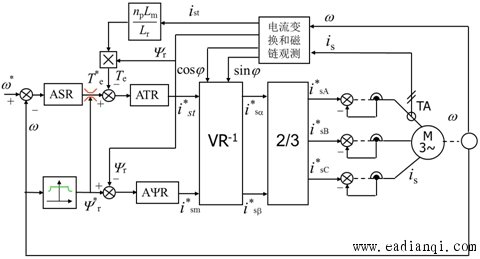
图6-55用除法环节使与解耦的系统是一种典型的转速、磁链闭环控制的矢量控制系统,模型在图中略去未画。转速调节器输出带“”的除法环节,使系统可以在第6.7.2节最后指出的三个假定条件下简化成完全解耦的与两个子系统,两个调节器的设计方法和直流调速系统相似。调节器和坐标变换都包含在微机数字控制器中。 (1) 转速磁链闭环微机控制电流滞环型PWM变频调速系统
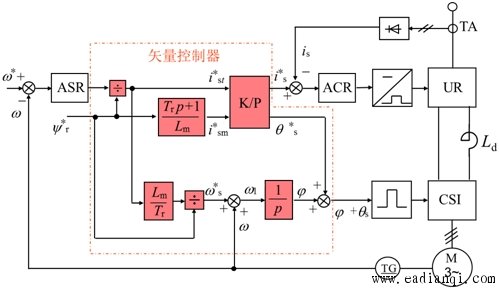
工作原理 转速正、反向和弱磁升速, 磁链给定信号由函数发生程序获得。 转速调节器ASR的输出作为转矩给定信号,弱磁时它还受到磁链给定信号的控制。 在转矩内环中,磁链对控制对象的影响相当于一种扰动作用,因而受到转矩内环的抑制,从而改造了转速子系统,使它少受磁链变化的影响。 五、 磁链开环转差型矢量控制系统——间接矢量控制系统 在磁链闭环控制的矢量控制系统中,转子磁链反馈信号是由磁链模型获得的,其幅值和相位都受到电机参数和变化的影响,造成控制的不准确性。
自动控制网www.eadianqi.com版权所有
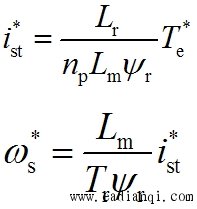
二式中都应除以转子磁链,因此两个通道中各设置一个除法环节。
本文来自www.eadianqi.com
采用两组晶闸管反并联的可逆V-M系统,如果两组装置的整流电压同时出现,便会产生不流...