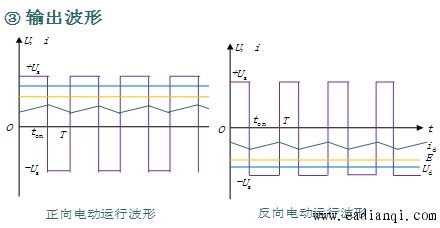
·当 > 0时, t on > T/2 ,Ud = +,电机正转; ·当 < 0时, t on < T/2 ,Ud = -,电机反转; ·当 = 0时,ton = T/2,电机停止。 本文来自www.eadianqi.com ◎注意: 当电机停止时电枢电压并不等于零,而是正负脉宽相等的交变脉冲电压,因而电流也是交变的。这个交变电流的平均值为零,不产生平均转矩,徒然增大电机的损耗,这是双极式控制的缺点。但它也有好处,在电机停止时仍有高频微振电流,从而消除了正、反向时的静摩擦死区,起着所谓“动力润滑”的作用。 双极式可逆PWM制动时情况比较复杂,根据VT3、VT2的通断情况,电机可能处在能耗制动、再生发电或反接制动,产生制动时一定具备上述其中一个制动过程。 ⑤ 性能评价 ·双极式可逆PWM变换器的优点: a)电流一定连续; b)可使电机在四象限运行; c) 电机停止时有微振电流,能消除静摩擦死区; d)低速平稳性好,系统的调速范围可达1:20000左右; e)低速时,每个开关器件的驱动脉冲仍较宽,有利于保证器件的可靠导通。 本文来自www.eadianqi.com ·双极式可逆PWM变换器的缺点: a)在工作过程中,4个大功率晶体管可能都处于 开关状态,开关损耗大; b)在切换时可能发生上、下桥臂直通的事故,为了防止上述情况,在上、下桥臂的驱动脉冲之间,应设置逻辑延时。
本文来自www.eadianqi.com
采用两组晶闸管反并联的可逆V-M系统,如果两组装置的整流电压同时出现,便会产生不流...